
Este blog nace con la traducción de un interesantísimo documento en el que se explica cómo se construye un picosatélite, satélite de reducidas dimensiones (10 x 10 x 10 cms) y muy ligero <1Kg. Este satélite fue construido por estudiantes de la universidad de Aalborg en Dinamarca. El interés de este documento se basa en su descripción exhaustiva, que llega a todos los subsistemas de la misión.
Creo que es un buen punto de comienzo para todos aquellos que quieren profundizar en este mundo de tecnología y ciencia y desean ser parte activa de él.
¿Cómo se construye un satélite artificial?
Análisis de la misión
2.1 Objetivos de la misión
El desarrollo del AAU CubeSat es llevado a cabo por un número de grupos de proyecto que tienen la responsabilidad de diseñar y desarrollar los diferentes subsistemas.
Objetivos:
- Tomar fotografías de la Tierra desde una órbita baja (LEO) en aprox 700 Km de altura. Se usará una cámara CMOS. Tomará fotos en color en el espectro visible. Las fotografías serán transmitidas a la estación de tierra y se publicarán en internet. El ámbito de cobertura de las fotografías se restringen a Dinamarca.
- Aumentar el interés público en las ciencias del espacio.
- Obtener experiencia para futuras misiones
- Observación de las estrellas. Monitorizar las estrellas de forma eficiente requiriría un análisis de los datos de la cámara, difícil de implementar en un CubeSat.
2.2 Ciclo de vida
- Pre-lanzamiento: Comienza cuando el desarrollo y testeado del satélite ha sido completado y éste transportado a Kazagstán. Antes del lanzamiento los tests serán desarrollados para asegurar que funciona, y que cumple con los requerimientos establecidos en la Guía del carga del P-POD. En la etapa final de la fase de prelanzamiento el satélite se transporta al lugar de lanzamiento y se introduce en el P-POD, que ha sido montado en la plataforma del satélite del vehículo de lanzamiento. El P-POD es un mecanismo sencillo diseñado para lanzar el satélite. Durante el tiempo que el CubeSat está dentro del P-POD un interruptor mecánico asegurará que todos los subsistemas están sin energía eléctrica. Hasta el lanzamiento permanecerán sin energía.
- Lanzamiento: EL vehículo de lanzamiento será un cohete tipo Dnepr. Después de la fase de Pre-lanzamiento la fase de lanzamiento llevará sólo pocas horas incluyendo las últimas preparaciones y el lanzamiento propio en el tiempo de vuelo.Puesta en servicio: Después de la puesta en órbita de la carga, seguirá la puesta en servicio de los satélites. La carga primaria, consistente en uno o dos microsatélites, se pondrán en servicio. Después de un retraso de minutos u horas seguirá la puesta en servicio de los CubeSats. Los P_PODs se abrirán uno por uno lanzando los 3 CubeSats al espacio. Despues del lanzamiento el CubeSat se auto-inicializará después de unos minutos.
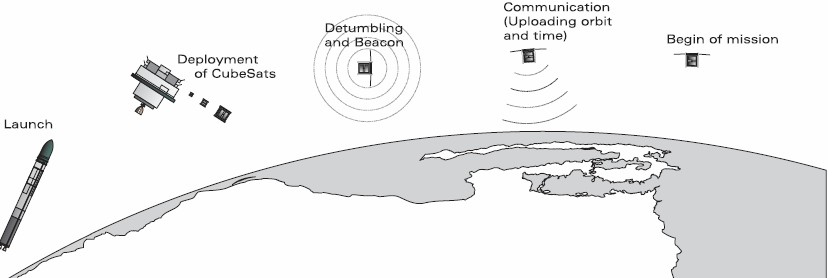
Este retraso es necesario con el propósito de adquirir cierta distancia del P-Pod y los otros CubeSats antes de la puesta en servicio de las antenas de comunicación. El computador de abordo se iniciará con una secuencia para los subsistemas. El subsistema de comunicación incluye una función baliza que será activada en este proceso y enviará una señal estándar baliza.
Cuando se ha inicializado el subsistema de control y determinación de posición, éste iniciará una maniobra de giro. Esta maniobra se realiza para frenar las rotaciones del satélite que has podido causar el lanzamiento. Cuando esta maniobra acabe el satélite apuntará los panales solares hacia el Sol para recoger tanta energía como sea posible. Tan pronto se establece la primera comunicación con el satélite, la baliza primaris se apagará y el satélite recibirá las propiedades de su órbita, para obtener conocimiento de su posición.
- Misión en órbita: El satélite recibirá un plan de vuelo, que incluye cómo se comportará en diferentes momentos. Autonómicamente éste cambiará su posición y en un momento específico tomará una foto del objetivo. Durante los siguientes pases sobre la estación de tierra los datos se retransmitirán y el satélite recibirá el plan de vuelo para la siguiente foto. Cuando el satélite no toma fotos tratará de economizar el consumo de energía. El satélite durante la misión estará expuesto a muchos efectos medioambientales. Estos van desde el vacío efectos de sobretemperatura y cambios importantes de temperatura hasta radiaciones electromagnéticas.
- Fin de vida y reentrada: El satélite será diseñado para tener una vida activa de al menos 1 año. Después de finalizada su funcionalidad, permanecerá en órbita como reiduo espacial. Finalmente arderá durante la reentrada, aproximadamente 20 años después de su lanzamiento, finalizando su existencia con un efecto visual menor en el cielo nocturno.
2.3 Descripción del sistema:
El sistema completo incluye el satélite y la estación terrestre para comunicación con el satélite. Éste se divide en los siguientes subsistemas:
- Estructura del satélite: Debe cumplir los requisitos establecidos por la OSSS (solución para satélite de una parada ¿?) y la Universidad de Stanford, que originalmente ha desarrollado el concepto de CubeSat. El tamaño del satélite será de 10 x 10 x 10 cms, mientras que su peso será inferior a 1 Kg. Para conseguir esto, se usarán materiales ligeros. Su diseño se basará en un bastidor de aluminio con sus caras hechas en fibra de carbono. Se han establecido altos requerimientos en relación a la estructura del satélite y su integridad, como su resistencia a altas temperaturas, que varía entre +80 y -40, vibraciones y chocques, radiaciones, y el vacío en el espacio. El grupo responsable de la estructura del satélite será tembién responsable del peso y del presupuesto.
- Suministro de energía: La unidad de suministro de energía (PSU) consiste en 4 baterías Li-Ion de 3,7 V y 5 pares de paneles solares de triple unión, que se disponen en la superficie de 5 de las 6 caras del satélite. La PSU proporciona a otros subsistemas un voltaje nominal de 5V y monitoriza el funcionamiento de los diferentes subsistemas relacionados con su consumo de energía. Aparte de ser utilizados para recolectar energía eléctrica los paneles solares se utilizan también como sensores solares de reserva para el ADS.
- Ordenador de abordo: Los subsistemas de abordo se controlan desde un ordenador de abordo central (OBC) del tipo C161PI de SIEMENS. Tiene una CPU de 16 bits y un espacio total lineal de 16Mb. Utilizará 2 tipos de memoria. Un módulo ROM para operaciones acumuladas y reservadas y un módulo RAM para el software del sistema, manejo interno y datos de carga. La comunicación entre el ordenador y los subsistemas se hará por medio de un bus, que se conectaráentre la unidad de suministro de energía, la determinación y control de posición, la cámara y la unidad de comunicación.
- Cámara: La carga útil será una cámara de abordo para obtener fotografías. Utiliza un chip de una cámara digital CMOS basada en un Kodak kac1310 de 1,3 megapixels, que ha sido suministrada por DEVITECH. Tomará fotos de la Tierra con un campo de visión de 100 x 80 kms y una resolución de 1280 x 1024 pixels con una intensidad de color de 24 bits. La lente frontal de la cámara CMOS está hecha a mano con un diámetro de 20 mm con un largo de 50 mm.
- Unidad de comunicación: Para recibir telemetría de la estación terrestre así como para transmitir el estado de abordo y las fotos tomadas durante el vuelo, se usa una unidad de comunicación. En este caso la unidad de comunicación de abordo y la antena se compraron en OSSS y se comunicará con tierra utilizando frecuencias de radio amateur. La antena unida al satélite se desplegará después del lanzamiento desde el P-POD al espacio. Para poder comunicarse con el satélite desde tierra, se usará una antena seguidora (¿?) que seguirá el movimiento del satélite en el cielo
- Sistema de control y determinación de posición: Se usará para apuntar la cámara que está fija en la estructura del satélite. El ADCS es también necesario para apuntar tres de las caras del satélite con los paneles solares hacia el Sol para maximizar la entrada de energía. Esto también asegura que la cámara no se apunta directamente al Sol. El ADCS está dividido en 2 proyectos. Uno desarrolla el control relativo a la parte del subsistema ACS. Incluye los actuadores y los algoritmos de control. La otra parte es la determinación de la posición. Incluye sensores de desarrollo y algoritmos para determinación de la posición.
- Estación de tierra: Se localiza en Aalborg. Comunicará con el satélite y bajará las fotos y los datos de manejo. De la misma manera se cargarán los nuevos planes de vuelo y configuraciones desde la estación de tierra al satélite. La descarga completa de una foto llevará varias órbitas, ya que la descarga corriente a una velocidad de 9600 bits/seg llevará unos 20 min, y paso por Dinamarca en una órbita lleva 8 min.
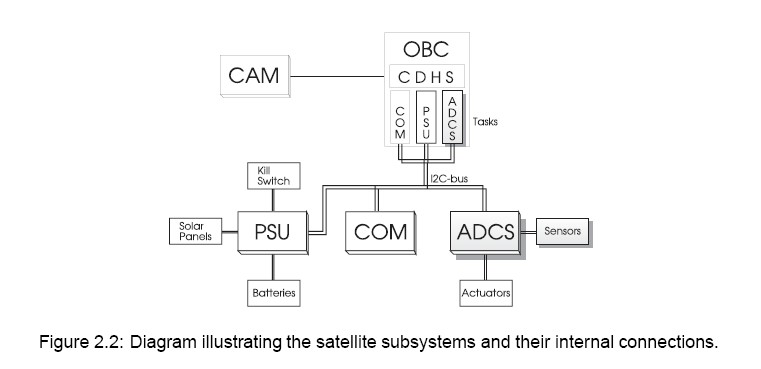
2.3.1. Conexiones entre subsistemas
Los subsistemas se conectan como se indica en la figura 2.2. La cámara está conectada al ordenador por separado, mientras la comunicación entre el ordenador, la unidad de energía, la unidad de comunicación y el ADCS van a dar al bus IC.
La unidad de suministro de energía se conecta al interruptor principal, a las baterías y a los paneles solares, mientras que el ADCS cuelga a los sensores y a los actuadores.
El CDHS está instalado en el ordenador con la tarea de interconectar los subsistemas PSU, COM y ADCS. Cada una de las tareas recolecciona los estados de los subsistemas y envía las órdenes desde el CDHS a los subsistemas. Los datos provenientes de los subsistemas incluyen estatus e informes de error para ser almacenados, interpretados y actuar sobre la tarea del subsistema en el ordenador central.
La tarea para el ADCS implementada en el ordenador incluye los algoritmos para la determinación de la posición. Los algoritmos para el control de posición si implementan en un microcontrolador en el subsistema de ADCS. Ëste está conectado a actuadores y a sensores. El uso de esta estructura significa que los datos del sensor se incluirán en los datos del subsistema ADCS y se enviarán a la tares ADCS del OBC. En el OBC la posición se determinará basándose en los datos del subsistema. La diferencia entre la posición de rederencia y la posición actual se devolverá al subsistema ADCS donde se utilizará para el control de posición.
La principal pieza del software de determinación de posición será implementado en las operaciones de ADCS en el ordenador. Sólo se necesitan unos pocos algoritmos para muestrear los sensores en el microcontrolador del subsistema ADCS. El trabajo relacionado con el subsistema ADCS ha estado desarrollando y conectando los sensores y escribiendo el software para probar los sensores.
2.4 Precisión requerida en la orientación
Se usa una consideración muy sencilla para determinar los requerimientos para la precisión en la orientación del satélite. La precisión requerida cuando se tomauna foto se basa en el tamaño y en la resolución de la foto. La foto tomada a una altura de unos 700 Km sobre la superficie de la tierra cubrirá aproximadamente 100, 100 Kms. La desviación máxima del entro deseado para la foto al actual centro de la foto se decidió que sería de aproximadamente 100Kms. De acuerdo con estos parámetros una exactitud en la orientación se calcula según la ecuación siguiente:

Esta exactitud en la orientación es de 8º, de acuerdo con la exigencia principal del ADCS.
2.5 Los modos de operación del ADCS
El satélite depende del ADCS para cambiar su posición cuando realiza una foto o cuando optimiza la recolección de energía. Para obtener esto se han definido los siguientes modos de operación sobre el satélite:
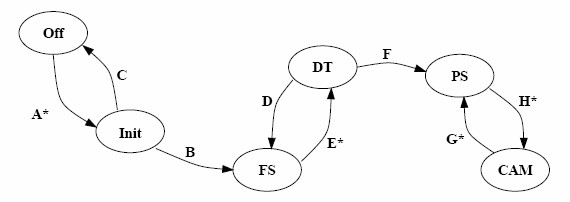
Inicialización, seguridad ante fallo, detumbling, ahorro de energía y modo cámara. Se muestra en la figura un diagrama de estado. El ADCS comienza en el estado Off. Las funciones marcadas con un * están unidas externamente por el OBC o PSU. El diagrama de estado muestra el flujo naural entre los estados en el ADCS. Aparte de esto haremos notar los siguientes puntos relacionados con el ADCS:
1.- Ante un fallo cualquier estado puede ir al estado OFF (reseteado suave)
2.- El sistema de mando y manejo de datos (CDHS) puede en cualquier momento forzar al ADCS a cualquier estado: Inicialización, seguridad ante fallo, detumbling, ahorro de energía y modo cámara.
3.- El CDHS y el PSU puede forzar al ADCS al estado OFF con un reiniciado del hardware o una desconexión de energía.
Inicialización (Init): Después de la puesta en servicio o en un reinicio la unidad de generación de energía enciende el subsistema ADCS A. Durante la este proceso se inicializan los sensores y actuadores en el ADCS. Los errores de la inicialización del hardware del ADCS se comunican como estado interno.
Seguridad ante fallo (FS): Cuando la inicialización Init está completada B el ADCS entra automáticamente al modo de operación de seguridad ante fallo (FS). En este modo el ADCS estará en standby hasta que un comando del CHDS le permite continuar E hasta el modo detumbling.
Detumbling (DT): En este modo el ADCS girará el satélite. Si el giro se completa con éxito o no se necesita ningún giro, el sistema continuará hasta F al modo de ahorro de energía. Si se produce un retraso en el modo detumbling el ADCS volverá D al modo de seguridad ante fallo.
Ahorro de energía (PS): En el modo de ahorro de energía PS el ADCS cambiará la posición del satélite, y por tanto de los 3 paneles solares dirigiéndolos hacia el Sol. Esto se hace para obtener una máxima entrada de energía . Cuando el satélite está en la sombra de la Tierra (eclipse), es importante que ese consumo de energía se mantenga en valor bajo en todos los subsistemas. En un momento planificado en el plan de vuelo, el satélite necesita cambiar la orientación para adquirir una foto, el CDHS ordena al ADCS cambiar al modo cámara H.
Modo cámara (CAM): En el modo cámara el ADCS cambiará la posición del satélite para tomar una foto. El ADCS recibirá la posición de referencia del CDHS. En el plan de vuelo se especificael momento en el que el ADCS irá al modo cámara, y cuando el CDHS tomará lafoto con la cámara. Después de que la foto se haya tomado G, el sistema volverá al modo de ahorro de energía PS.

Se ha decidido usar el plan de vuelo para especificar cuándo cambiar al modo cámara y cuándo abandonarlo. Este momento se calcula previamente en la estación de tierra usando un modelo orbital. Se muestra en la figura el proceso de adquisición de fotos. El satélite entra desde la derecha de la figura en el modo de ahorro de energía. El CDHS ordena a la cámara obtener la foto. Después de esto el CDHS ordena al ADCS cambiar a modo de ahorro de energía. No se necesita ningún control de posición para asegurar la comunicación con la estación de tierra. La determinación de la posición se necesita en en el modo de ahorro de energía y en el modo cámara. La exigencia en la precisión del modo cámera se utilizará también para el modo de ahorro de energía.
Sistema de determinación y control de la posición (1)
3.1 Ejes de coordenadas
Con el propósito de determinar la posición en el espacio tridimensional, se definen varios sistemas de coordenadas. Se describen a continuación:
3.1.1 Sistemas de coordenadas de referencia
Para definir una órbita alrededor de la Tierra, se dan de antemano dos sistemas de coordenados específicos ligados a la Tierra. Ambos tienen su origen en el centro de la Tierra y se llaman eje de coordenadas inercial (ECI) y eje de coordenaas fijo (ECEF). Se muestran en la figura.

El sistema de coordenadas ECEF. El eje X pasa a través de la longitud cero, también conocido como meridiano de Greenwich, y tiene el eje Z paralelo al eje de rotación. De esta forma el sistema de coordenadas ECEF es fijo a la Tierra y rota con ella.
3.1.2 Sistemas de coordenadas del satélite
Para determinar la posición del satélite se introducen algunos sistemas de coordenadas solidarios al mismo. La posición del satélite viene dado como una relación entre los sistemas fijos de coordenadas del satélite y los sistemas de referencia.
El sistema SBC, llamado así por Spacecraft Body Frame, se sitúa en el centro de masas del satélite y es solidario a los ejes geométricos del satélite. En el caso del AAU CubeSat el eje X es paralelo al eje de la cámara. Consiguientemente los ejes Y y Z se sitúan perpendiculares a las caras del satélite. (Se definirá más adelante)
El sistema SCP. De Space Craft Principal Axes es similar al SBC. Sin embargo no es solidario a las propiedades geométricas del satélite, sino a las propiedades inerciales. Representa los ejes principales, en los que los momentos de inercia principales se dan como una matriz diagonal. (Se definirá más adelante)
El sistema SCO. De Space Craft Orbit Frame, que es el enlace entre los ejes fijos del satélite y los sistemas de referencia. Es paralelo a los ejes ECI pero centrado en el centro de masas del satélite. Este sistema se usa para transferir los vectores calculados con referencia a los sistemas de coordenadas centrados en la Tierra hacia la posición del satélite para compararlos con las medidas de la determinación de posición en el sistema SCB.
3.2 Método de control de la posición
El método empleado se determina en cooperación con el grupo responsable del diseño e implementación del control de posición. Se consideraron como posibles actuadores volantes de inercia, magnetorquers, ... Se ha elegido el uso de magnetorquers debido principalmente a su tamaño reducido. Los magnetorquers se montan exteriormente a la estructura del satélite y a diferencia de los volantes de inercia no tienen elementos móviles, lo cual es una ventaja cuando consideramos el tiempo de vida y la complejidad del satélite. Se ha decidido el uso de 3 magnetorquers. El satélite será dirigido de forma inercial, como muestra la figura. Esto significa que la referencia de control de posición es un vector de posición dado en el sistema ECI. Durante el día el vector de referencia apunta al Sol (ahorro de energía). En el modo cámara el vector de referenciava del punto de la órbita (punto desde donde se toma la foto) hasta el emplazamiento a ser fotografiado.

3.3 Sensores de determinación de posición
Para conseguir un control de posición en los 3 ejes es necesario determinar totalmente la posición de los 3 ejes en el sistema ECI. La elección de los sensores para el satélite se describe a continuación.
Al menos se necesitan 2 medidas vectoriales no colineales en el sistema SBC al mismo tiempo que los vectores correspondientes en el sistema ECI. La posición puede ser determinada usando un modelo matemáticopara la órbita del satélite conjuntamente con los elementos de Kepler que describen la órbita. Las medidas del vector en el sistema SCB se obtienen usando sensores de posición. Los vectores correspondientes en el sistema ECI se determinan por modelos matemáticos. Los sensores para determinación de posición en un satélite pueden dividirse en sensores de referencia y sensores inerciales. Un sensor de referencia mide en el sistema SCB la dirección a un punto de referencia conocido en el sistema ECI, mientras que un sensor inercial mide el movimiento rotacional o translacional. Se describen más adelante diferentes tipos de sensores.
3.3.1 Sensores de referencia usados en satélites
Los sensores de referencia considerados en el proyecto son: sensores de estrellas, sensores de horizonte, sensores solares, magnetómetros de 3 ejes y GPS.
Sensores de estrellas: son cámaras utilizadas para reconocer los tipos de estrellas en el campo de visión del sensor. Las tecnologías como CCD, APS y CMOS pueden utilizarse para estas tareas. La localización de 2 ó más estrellas en el sensor es suficiente para determinar la posición del satélite. Esto quiere decir que un solo sensor puede determinar una posición en 3 ejes, cuando se dirige hacia el cielo. Se necesita un base de datos de estrellas para reconocer el modelo de estrella y determinar los vectores en el sistema ECI.
Sensores de horizonte: detectan el umbral entre entre la luz infrarroja de la atmósfera de la Tierra y el espacio. Utiliza un diodo infrarrojo y una lente. Hay 2 tipos, escáners e indicadores de cruce de horizonte. Un sensor de cruce de horizonte está fijo a la estructura del satélite y sólo proporcionará información valiosa de la posición cuando la linea de visión de los sensores cruce el umbral entre la atmósfera y el espacio. Debido al tamaño, peso y complejidad sólo se considererán para nuestro proyecto los indicadores de cruce de horizonte estáticos. Este tipo de sensores tienen que ser utilizados conjuntamente con otros sensores de posición, si se utiliza en el satélite.
Sensores solares: Se usan para proporcionar un vector de medida dirigido al Sol. Estos sensores están disponibles en diseños diferentes, tamaños pequeños y bajo peso de solo unos pocos gramos. Un sensor sencillo de este tipo es el sensor coseno que usa el principio de que la salida de corriente de la célula solar de silicio tiene una variación sinusoidal con el ángulo de entrada de luz solar. El sensor coseno es un sensor solar de un solo eje, y uno en cada cara del cubo hace posible determinar un vector solar. Existen diferentes diseños para hacer sensores solares de 2 ó 3 ejes. Estos diseños generalmente usan un filtro para oscurecer la luz entrante y múltiples sensores de silicio de diferentes formas y tamaños. El vector medido se compara con un modelo de abordo de la dirección del Sol en el eje ECI. El albedo entrante afectará a la precisión del sensor.
Magnetómetro de 3 ejes: En una órbita LEO, donde el campo magnético terrestre es intenso y está bien definido, un magnetómetro de 3 ejes proporcionará valiosa información sobre la posición. Los magnetómetros son de 3 tipos: de fusible, resistivos o inductivos. Los hay pequeños, ligeros y de bajo consumo. Sin embargo, la electrónica del satélite y las perturbaciones externas suelen provocar distorsiones en los magnetómetros. El vector de campo magnético medido se compara con un modelo interno del campo magnético para determinar la posición del satélite.
GPS: Este sensor se utiliza para dar la posición del satélite. Esta tecnología no se considerará para CubeSats ya que su posición se determina utilizando un modelo orbital conjuntamente con elementos Kepler proporcionados por NORAD.
3.3.2 Sensores inerciales utilizados en satélites.
Se incluyen acelerómetros y giroscopios.
Acelerómetros: Miden las aceleraciones translacionales. Son típicamente empleados con un sistema de propulsión de abordo y por lo tanto no interesan para nuestro caso.
Giroscopios: Se usan para determinar los movimientos rotativos del satélite como velocidades angulares. Estas velocidades pueden emplearse para estimar la posición o para proporcionar una realimentación para el control de la posición. Sin embargo, debido a la deriva es necesario también utilizar sensores de posición para compensar este efecto y determinar una posición precisa. De esta forma los giroscopios pueden suplementar a otros sensores para mejorar la determinación de la posición. Están disponibles en tamaños muy pequeños, de bajo peso y bajo consumo y han sido utilizados también en algunos CubeSats.
3.3.3 Elección de sensores para el AAU CubeSat
Debido a las características del CubeSat y para reducir costes se desestiman los sensores comerciales. Por tanto uno de los puntos del proyecto será el desarrollo de los sensores. De los sensores descritos, los sensores de estrellas, los de horizonte, los solares, los magnetometers y los giroscopios se consideran los más adecuados para el CubeSat. Se discute a continuación cada uno de los sensores:
Sensores de estrellas: Aunque éstos son los más precisos, se ha decidido no utilizar este tipo de sensores. Sería posible diseñar un rastreador de estrellas usando un chip de una cámara, pero se considera que la tarea de desarrollar este tipo de sensor sería demasiado grande teniendo en cuenta el tempo limitado del proyecto. Además el tiempo de procesado de información necesario para determinar la posición respecto las constelaciones podría suponer un problema. El consumo de un chip de una cámara y la electrónica necesaria para interconectarlo sería relativamente grande comparado con otros sensores. El uso de un chip de una cámara, que no ha sido previamente probado en el espacio supondría pruebas adicionales para asegurarse de que el elemento elegido es el correcto.
Sensores de horizonte: Una clara desventaja de éstos es que éstos sólo proporcionan datos de posición cuando detectan el umbral entre la atmósfera y el espacio. Esto quiere decir que los indicadores de cruce de horizonte son más útiles cuando el satélite está en rotación. Pero el satélite no puede girar, ya que se podría estropear la foto mientras toma imágenes de la Tierra. Los scanners de horizonte que son sensores de horizonte de rotación, no son aptos para el satélite porque incluyen piezas móviles, ocupan más espacio y son más complejos. Una ventaja de estos detectores respecto a los detectores solares es que se pueden emplear en eclipse, ya que emplean detectores de infrarrojo. Sin embargo, esto no compensa sus desventajas y se ha decidido no utilizar estos sensores.
Sensores solares: Debido a su bajo peso, pequeño tamaño, bajo consumo y un amplio rango de diseños posibles, los sensores solares son la elección más adecuada para un tipo sencillo de sensor. Los diseños posibles van desde los sensores de 3 ejes, que determinan la dirección del sol como un vector tridimensional, pasando por el diseño de sensores solares de 2 ejes hasta sencillos sensores de intensidad lumínica, como fotodiodos. Como algunos de estos sensores dependen de la temperatura, se necesitan medidas de temperatura para compensar sus efectos. Una desventaja de estos sensores es que no sólo miden la intensidad de la luz del Sol, sino también la luz del albedo de la Tierra. Este introduce un error en el vector medido. Otra desventaja es que proporciona un vector al Sol cuando éste está en eclipse. Sin embargo, los objetivos de la misión sólo establecen requerimientos para la determinación de posición en zonas de luz.
Estos sensores se han escogido como sensores adecuados para el sistema de determinación de la posición del CubeSat. Durante las pruebas el Sol se simulará utilizando una fuente de luz potente.
Magnetómetros: Como el campo magnético de la Tierra está bien definido y es potente en la órbita del CubeSat, estos sensores pueden ser aceptables. Cuando utilizamos un magnetómetro debemos tener cuidado con las perturbaciones en las mediciones, especialmente cuando el sensor está dentro de la estructura del satélite, rodeado de otros subsistemas y los campos electromagnéticos que producen. Se requiere una calibración del magnetómetro cuando se finaliza el montaje del satélite. Incluso esto limitará el uso del magnetómetro a intervalos, cuando las bobinas del satélite están desactivadas. Se ha decidido incluir un magnetómetro en el satélite para combinar sus mediciones con las mediciones de los sensores solares escogidos y así ser capaces de proporcionar una posición en los 3 ejes. Para probar el magnetómetro se usará el campo magnético terrestre a nivel del suelo.
Giroscopios: Los hay pequeños y ligeros. Consumen poco y proporcionarían información útil sobre velocidades angulares del satélite. Podrían ser muy útiles combinándolos con sensores de referencia y especialmente mientras se estabiliza el satélite. Sin embargo, la utilización de giroscopios incrementaría el tiempo necesario para desarrollar y probar el hardware. Además ocuparía un espacio importante dentro del satélite y el tiempo necesario para la integración. En lugar de utilizar giroscopios, se pueden determinar velocidades angulares por diferenciación de la posición.
3.3.4 Elección del sensor solar
Para el diseño del sensor solar hay varias opciones. Se requiere que sea ligero y pequeño. Además debe ser de diseño sencillo por el tiempo limitado. Cuando el satélite está en zona de luz, sin importar qué cara enfoca al Sol, sería posible determinar la dirección del Sol. En la figura podemos ver los tipos de sensores solares.

Sensor solar de 3 ejes: Con 3 ejes este sensor es capaz de determinar la dirección del Sol utilizando sólo un sensor. En este diseño se usan 4 celdas fotovoltaicas rectangulares dentro de un cierre y con una apertura en la parte superior. En este sensor la salida de cada celda tiene que ser medida y comparada con cada una de las otras para determinar el ángulo de entrada de la luz solar.
En vez de utilizar 4 detectores una alternativa sería utilizar un chip CMOS para el mismo propósito.
Sensor solar de 2 ejes: Este ejemplo de sensor de 2 ejes usa 2 detectores triangulares de silicio superpuestos, colocados dentro de un alojamiento de aluminio. Se coloca una ventana de cuarzo con una rendija encima de los detectores y permite que sólo un rayo de luz incida sobre ellos. De esta forma es posible medir la dirección de la luz en 2 ejes determinando la diferencia de la salida de los 2 detectores.
Si se utiliza este tipo de sensores, serían necesarios al menos 2 en la cara que apunta al Sol, para determinar la posición del Sol en 3 dimensiones.
Una ventaja de los sensores de 2 y 3 ejes es que son independientes de la temperatura a la que están expuestos, ya que utilizan la diferencia entre sus sensores, que están expuestos a la misma temperatura, para determinar la dirección del Sol.
Sensores solares de 1 eje: Determina el ángulo entre la entrada de la luz solar y un eje perpendicular a la superficie del sensor. También se llama sensor coseno porque su resultado se obtiene con el coseno del ángulo de entrada de luz. Se requiere un mínimo de 3 sensores coseno posicionados perpendicularmente uno con otro para determinar la dirección del Sol. Como la forma del satélite es cúbica este sensor se puede adaptar fácilmente.
La respuesta espectral de los sensores solares depende de la temperatura y como tienen que estar expuestos a un amplio rango de temperatura cuando se sitúa en la superficie del satélite, será necesario medir las temperaturas en los sensores solares y compensarlos para las temperaturas en los datos del sensor.
El diseño mecánico y la fabricación de sensores es más simple en el caso de sensores solares de 1 aolo eje, ya que éstos sólo requieren una conexión para montar una célula fotovoltaica y un termistor para medidas de temperatura. La fabricación requiere la construcción de un alojamiento preciso, un alineado exacto de los elementos del sensor y en algún caso incluso un corte de silicio en formas triangulares precisas. Como el satélite tiene forma de cubo, podremos utilizar un sensor coseno. Cada sensor coseno tiene un campo de visión de 180º y el uso de 6 sensores proporciona una visión completa de 360º. Los sensores de 2 y 3 ejes tienen un campo de visión que están limitados por la altura de sus alojamientos y el tamaño de sus elementos. Esto quiere decir que se necesitaría 1 sensor de 3 ejes o 2 sensores de 2 ejes en cada cara del satélite. El número total de sensores solares necesarios en el satélite, cuando se consideran diferentes diseños, se especifica en la tabla:

En los diseños considerados, se usa una célula fotovoltaica en el sensor solar de 1 eje, 2 celdas en el de 2 ejes, y 4 celdas en el de 3 ejes. Esto quiere decir que se necesitará el mismo número de circuitos amplidficadores para interconectar los sensores. El resultado sería un total de 24 circuitos amplificadores para interconectar los sensores de 2 o 3 ejes mientras que se requieren sólo 6 para los de 1 eje. Usando amplificadores diferenciales para los sensores de 2 ejes la cantidad total de amplificadores se reduce a 12. Para los de 1 eje se necesitarían 6 sensores adicionales para la compensación de temperatura de los datos del sensor solar.
Una ventaja de los sensores coseno es que los paneles solares utilizados para la energía pueden ser utilizados como sensores solares secundarios. De esta forma se añade una redundancia a los sensores solares en las 5 caras con los paneles solares. Éstos no son muy exactos cuando se emplean como como sesnores solares porque el albedo de la Tierra afecta en las mediciones. El albedo de la Tierra es luz reflejada del Sol y es de casi el 30,5% del flujo solar. El albedo tiene el mismo efecto en los sensores de 1 eje. En los de 2 ejes y 3 ejes a menudo será posible usar sensores solares hacia el Sol sin que estén afectados por el albedo. Se ha decidido utilizar sensores coseno por la simplicidad del diseño. Estos tienen una precisión menor debido al albedo i es necesario introducir una compensación de albedo para reducir este error. Sin embargo, los paneles solares pueden usarse como sensores solares utilizando los mismos algoritmos que los usados para los sensores solares principales.
3.3.5 Elección del tipo de magnetómetro de 3 ejes
Debería ser pequeño y ligero. Se utilizan circuitos integrados magnetorresistivos de Honeywell. Son pequeños, robustos y de bajo consumo. Pueden integrarse en el circuito impreso que se desarrolle para el sistema de control y determinación de posición. Se elige esta opción antes que comprar un producto comercial con la interconexión electrónica completa, ya que éste ocuparía mucho más espacio en el satélite.
Los componentes de Honeywell son los HMC1001 y HMC2002. Estos componentes deberían de ser capaces de resistir el ambiente extremo en la órbita durante el lanzamiento.
El HMC1001 y el HMC1002 tienen integradas opciones de configuración y reseteo para la polarización del puente magnetoresistivo usado para medir el campo magnético. Estos pines pueden ser cargados con corrientes altamente negativas o positivas. Se describe una técnica de configuración y reseteado para conseguir los siguientes beneficios:
- Operación de los sensores magnetorresistivos en modo de alta sensibilidad.
- Eliminación de compensaciones de temperatura en sensores.
- Eliminación de compensaciones en el circuito amplificador.
Con esta técnica se genera una pulsación Set y se muestrea los datos del mangetómetro. Esto es seguido por una pulsación Reset y un nuevo muestreo de datos. Se combinan ambos datos para crear un vector de campo magnético.
En el caso de que un componente deje de funcionar en el circuito de generación de pulsaciones Set/Reset, se pueden utilizar los datos del magnetómetro, pero con una precisión reducida. Se deben de introducir en cualquier caso desviaciones debidas a temperatura o a la electrónica.
Sistema de determinación y control de la posición (y 2)
3.4 Métodos de determinación de la posición del satélite
Con los sensores escogidos se puede determinar un vector que describa el vector del campo magnético en el sistema SCB. Ahora se necesita un método que pueda definir la posición a partir de 2 vectores. La determinación de la posición del satélite es equivalente a hallar la matriz rotacional que describa la orientación del sistema SCB en el sistema ECI. Los métodos posibles se dividen en soluciones determinísticas y en algoritmos de estimación recursiva.
Soluciones determinísticas: Estos métodos precisan de al menos 2 medidas vectoriales obtenidas al mismo tiempo para determinar la posición en los 3 ejes. Si falta una medida vectorial las soluciones determinísticas no pueden dar una posición.. Algunas posibles soluciones son: TRIAD, SVD, Q-METHOD, FOAM, QUEST y ESOQ.
Algoritmos de estimación recursiva: utilizan tanto medidas presentes como pasadas para determinar la posición. El filtro Kalman o el filtro Kalman extendido son algoritmos de estimación recursiva que utilizan un modelo espacial del sistema. Hay muchos métodos de determinación de la posición determinísticos, que varían en exactitud y en carga de operaciones de cálculo. Sólo consideraremos aquí como algoritmo de estimación recursiva al filtro Kalman Extendido.
3.4.1 Elección del método de determinación de posición
La determinación de la posición será más simple y directa de determinar y probar si se utiliza una solución determinística. Utiliza lecturas de sensores en un momento dado y no incluye la dinámica del sistema. Cuando se monta en el satélite con sensores solares y magnetómetro, la determinación de posición determinística se puede verficar aplicando entradas del sensor conocido al sistema y observando si la posición es determinada correctamente. El filtro Kalman no se puede verificar de una forma simple, ya que tiene en cuenta la dinámica del sistema. Los métodos determinísticos tienen algunos defectos comparados con el filtro extendido Kalman, que se menciona más adelante.
Los métodos determinísticos requieren de al menos 2 medidas vectoriales para determinar la posición. Este es un problema cuando el satélite está en eclipse y si el vector de campo magnético medido y el solar están alineados.
Cuando el satélite está en eclipse no puede usarse la medida vectorial del Sol. Sin embargo, para nuestro caso sólo se necesita realizar la medida cuando el satélite está en la zona iluminada. Cuando está en modo de ahorro de energía y en modo cámara ambas magnitudes vectoriales se obrienen de los sensores.
Para el caso en el que el campo magnético y el vector del Sol están alineados la solución determinística no sería válida. Sin embargo, sobre Dinamarca esto no ocurrirá, pero la correción de albedo necesaria para compensar el albedo de la Tierra puede causar la colinealidad del vector campo magnético y vector del Sol. Esto es debido a que la dirección del vector medido con los sensores solares cambia con el albedo de la Tierra.
Si esto ocurre se asumirá la última posición conocida hasta que los vectores dejen de ser colineales, y esto tardará 1 ó 2 minutos, debido a la velocidad del satélite.
Se ha decidido escoger una solución determinística para la determinación de la posición.
Los paneles solares comprados para el suministro de energía son son de unión triple y también convierten la luz en el espectro infrarrojo en energía eléctrica. Esto quiere decir que la radiación infrarroja de la Tierra alimentará los paneles incluso en eclipse. Además de esto, el control de posición se beneficiaría de ser capaz de trabajar también en eclipse. Por esta razón se ha decidido añadir a la determinación de posición determinista un filtro Kalman extendido.
Con la configuración de sensor escogida sería posible estimar la posición en eclipse cuando se utiliza un filtro Kalman extendido y los datos del magnetómetro. Una obstáculo para esto sería la determinación de una matriz de inercia precisa. Sin embargo, si el filtro Kalman falla, la solución determinista se puede utilizar de todas formas.
3.4.2 Precisión de los modelos de referencia
La precisión de los sensores tendrán efectos diferentes en el método determinístico y en el recursivo. Además de las medidas vectoriales hechas con sensores en l sistema SCB, se necesitan modelos de referencia para determinar vectores adicionales en el sistema ECI. Se necesitan por el campo magnético y para determinar una dirección al Sol. Además se necesita un modelo orbital que proporcione una posición en órbita para el modelo del campo magnético.
No se espera mucha precisión para los sensores solares debido al albedo de la Tierra. El método determinístico confiará siempre en ambos sensores, lo cual significa que se necesita una buena corrección de albedo para compensar los grandes errores de los sensores solares. La corrección del albedo debe reducir el error del vector solar para asegurar un error en la posición del satélite por debajo de 8.
El filtro Kalman puede confiar en los datos del magnetómetro para determinar la posición, esto disminuye la importancia de los datos del sensor solar y de la corrección del albedo. Sin embargo, aquí se vuelve importante el modelo de campo magnético para determinar el vector magnético en el sistema ECI. Las especificaciones de los errores angulares para modelos de campos magnéticos del orden de 1 a 7 pulgadas en una altitud de 300 Kms varían de 0,1º a 10º. La precisión aumenta con la altitud. Se ha decidido que el error angular del modelo del campo magnético introducido en el ordenador de abordo sea inferior de 1º. El error angular del modelo solar será bastante menor que 1º, y seá despreciable comparado con los errores de albedo. La baja precisión del modelo orbital afectará en la precisión del modelo del campo magnético. La precisión del modelo orbital disminuirá con el tiempo. Basado en simulaciones iniciales con modelos orbitales existentes, parece que lo esperado es un modelo orbital con un error de posición máximo inferior de 100 Km después de una semana.
3.5 Arquitectura de la determinación de la posición
Se ha decidido desarrollar una determinación de la posición determinística y una recursiva. Esto nos ofrece la posibilidad de probar ambos métodos cuando el satélite está en órbita. Se han definido 3 operaciones diferentes de determinación de la posición. La operación primaria utiliza una combinación de un filtro Kalman extendido y la solución determinística. La secundaria usa sólo la determinística y la terciaria sólo el filtro Kalman. A continuación se describen los algoritmos utilizados:
Datos de proceso del magnetómetro: Los datos recolectados se procesan para un campo magnético medido. Esto incluye un interruptor Set/Reset, calibración, toma en cuenta de los errores del magnetómetro y la creación de un vector unitario.
Datos de proceso de la temperatura: Los sesnores de temperatura tienen una relación no lineal entre el resultado del sensor y la temperatura. El procesado de los datos de temperatura incluye los filtros necesarios, la determinación de la temperatura de las lecturas del sensor y toma en cuenta de errores de los sensores.
Datos de proceso del Sol: Tanto los sensores solares como los paneles solares se pueden utilizar para obtener datos del Sol. Esto incluye el seleccionar los sensores primarios o secundarios, el filtrado necesario y la calibración.
Corrección de la temperatura: Corrige los datos del Sol en base a las temperaturas medidas.
Corrección del albedo: los sensores son sesnsibles al albedo de la Tierra. Este algoritmo añade una contribución del albedo de la Tierra al vector del Sol en el modelo solar.
Modelo orbital: determina la posición del satélite basándose en los datos julianos
Modelo del campo magnético: el vector de campo magnético en el sistema ECI se determina basándose en la posición del satélite.
Determinación determinística de la posición: Se van a utilizar las medidas vectoriales en el sistema SCB y los vectores correspondientes en el sistema ECI. Las velocidades angulares del satélite se hallarán por determinación de la posición.
Filtro Kalman extendido: El filtro Kalman extendido estima las velocidades angulares y la posición dadas las medidas de los sensores, los modelos del sistema dinámico y las descripciones estadísticas de las incertidumbres asociadas con éstas.
Selector: Este algoritmo se utiliza en la operación primaria para seleccionar bien la solución determnística o bien la recursiva.
Para el modelo orbital y para el solar se requiere que la fecha se dé en datos julianos. El DHCS sincroniza su reloj después de cada ciclo, cuando se comunica con la estación de tierra. Esta hora se da en tiempo Unix, y se convierte a juliano cuando se usa en el ADS.
3.5.1 Operación primaria. Se ilustra en la siguiente figura. Será la operación por defecto, con la que el satélite comienza después del arranque o reinicio del sistema.

La selección que se realiza en el bloque selector para la utilización de la determinación de la posición determinística o el filtro Karman se define como:
- Primeramente se determina una posición inicial por medio de una solución determinística para ser utilizada como filtro Kalman extendido. La determinación determinística sólo tiene que usar una serie de datos muestreados del sensor, para determinar la posición después de la cual la operación primaria utilizará el filtro Kalman extendido.
- Si el filtro Kalman no converge según lo esperado, se utilizará la solución determinística para reinicializar el filtro Kalman. Si esto ocurre durante eclipse se encontrará una solución determinística tan pronto como el satélite abandone el eclipe.
- El vector del campo magnético y el solar pueden ser determinados si son colineales por medio de una solución determinística. Si esto ocurre se utilizará la opción determinística hasta que encuentre una solución. Si después de 5 minutos no se encuentra una solución determinística, el filtro Kalman utilizará una posición inicial por defecto en vez de la solución determinística.
3.5.2 Operación secundaria
Se utiliza sólo la determinación de posición determinística. Es útil si el filtro Kalman falla

3.5.3 Operación terciaria
Utiliza sólo el filtro extendido Kalman. Para inicializar el filtro se utilizan los valores por defecto, en vez de utilizar la solución determinística como en la operación primaria. La operación puede ser utilizada para probar el filtro Kalman extendido en solitario. Esta operación también puede ser útil si tanto los sensores solares primarios como los secundarios están perdidos, haciendo imposible determinar la posición con el método determinístico.
3.6 Configuración del ADS
Debe ser posible la reconfiguración del sistema a partir de sus valores por defecto. Será posible actualizar los siguientes parámetros desde tierra:
Elementos de 2 lineas: Elementos Kepler que se usan para actualizar el modelo orbital. Se obtendrán cuando se dispongan del NORAD para asegurar la precisión del modelo orbital.
Lista negra de sensores : Se utilizan para excluir los sensores, paneles solares, magnetómetros y medidas de corrientes de las bobinas defectuosos.
Configuración del magnetómetro: Para la selección o no de la técnica de set-reset en el magnetómetro.
Factores de calibración para los sensores solares: Los factores de calibración para compensar las variaciones de foto sensitividad en los 6 sensores solares.

Factores de calibración para el magnetómetro: Para compensar los campos magnéticos constantes debidos a la estructura del satélite.
Corrección de albedo ON/OF: Selector de control de albedo
Umbral de luz solar: para determinar si el satélite está en eclipse, cuando se compara con el resultado de los datos del sensor.
Modo de operación: Elección de qué modo de operación utilizar. Por defecto se elige la operación primaria.
Los elementos 2 lineas deben ser actualizados en el ACDS cuando sea posible para asegurar un modelo orbital preciso. El resto de las opciones configurables son para reparar el ADS. El ADS puede sobrevivir a un número de errores en los diferentes sensores. Si un sensor falla es necesario utilizar un sensor redundante o reconfigurar el sistema para determinar la posición sin ese sensor. Se ha decidido mantener un nivel de autonomía en el ADS bajo, para mantener un diseño sencillo. Los errores en los sensores deberían de ser detectados y enviados en los datos de estado interno que se envían a la tierra. La reconfiguración del ADS se hace entonces desde tierra. Si un sensor deja de funcionar bien puede suponer un error en la determinación de la posición seguido por el control de la posición. Si esto ocurre antes o durante el satélite toma la foto, la foto puede salir desviada. Antes de la reconfiguración desde tierra pueden salir mal una o dos fotos debido al error.
Requerimientos y especificaciones de los test.
En este capítulo se especifican los requerimientos de la determinación de la posición tanto para el hardware como para el software.
4.1 División entre hardware y software.Se describen a continuación las diferentes partes:
4.1.1 Hardware
- Sensores solares
- Sensores de temperatura
- Magnetómetro de 3 ejes
- Micro controlador para interface de sensores y actuadores
- Micro controlador (OBC, ordenador de abordo)
Los sensores consisten en componentes del sensor y en circuitería de interconexión. El OBC se utiliza para los cálculos de la posición mientroas que se utiliza otro micro controlador para muestrear los sensores y generar señales de control a los actuadores. Los paneles sulares que se usan para el suministro de energía se usan también como sensores solares secundarios. No se especifica requerimiento alguno o pruebas para los paneles solares con respecto al sistema de determinación de posición. El sistema tiene una reactividad baja, y un tiempo total de muestreo de 300 ms se puede considerar adecuado y realista. Las partes sensitivas de los sensores de temperatura y del magnetómetro son en realidad resistencias que cambian con una ligera variación de la temperatura o del campo magnético, respectivamente. Por esta razón se puede esperar interferencias en las lecturas de estos sensores, y deberán ser menores que la resolución del conversor alterna – continua cuando se muestrean las señales.
El microcontrolador que sirve de interface entre sensores y actuadores debe estar disponible en versión EPROM ó EEPROM.
Para la versión final de la electrónica debería de estar disponible una superficie montada PROM. El microcontrolador se usará para muestrear los sensores, ejecutando los algoritmos de control e interconectando los actuadores.
4.1.2 Algoritmos para la determinación de la posición
Consisten en algoritmos para el procesado de datos de los sensores, modelos para dterminar un vector solar y un vector de campo magnético en el sistema ECI y el cálculo de las velocidades angulares y la posición hacia los vectores correspondientes medidos en el sistema SCB.
- Procesado de los datos del sensor
- Modelo solar de abordo
- Modelo orbital de abordo
- Modelo de campo magnético de abordo
- Corrección del albedo
- Determinación de posición determinística
- Filtro Kalman extendido
Para la simulación de la determinación de la posición, se necesitan modelos de referencia realistas para el modelo solar, el orbital y el del campo magnético. Éstos serán utilizados para simular el ambiente real respecto a los modelos de abordo.
4.2 Requerimientos
Los requerimientos para hardware se marcan con una H y los requerimientos para software con una S. Las especificaciones para pruebas se marcan con TS y TH (software y hardware).
4.2.1 Hardware para el ADS
Requerimientos generales
H1.1 Estimación de peso: El peso total del ADCS incluyendo el circuito impreso, los sensores y las bobinas no excederán los 90 grs.
H1.2 Estimación de energía: El consumo de energía del subsistema ADCS (sin incluir el OBC) será por debajo de los 450 mW, cuando está en modo de ahorro de energía (zona iluminada), cámara o modo inicialización, y por debajo de los 75 mW cuando está en modo fallo o en modo de ahorro de energía (en eclipse). Esto corresponde a 5 V y 90 mA en modo activo y 15mA un modo de fallo o modo de ahorro.
H1.3 El ADS entrará dentro de las especificaciones de espacio.
H1.4 Los componentes de hardware utilizados serán capaces de sobrevivir en un ambiente LEO, considerando las temperaturas, la radiación, el vacío y permanecer totalmente operativo.
H1.5 Los componentes de hardware no deben causar la liberación de gases o vapor o lo mínimo posible cuando están expuestos al vacío, para evitar que las partículas se depositen en las lentes de la cámara, en los paneles solares o en los sensores solares.
Requerimientos de los sensores
H2.1 El error máximo de medición de cada sensor solar primario, incluyendo errores en magnitud y en desalineado durante el montaje, será inferior a 4º.
H2.2 El error de medida máximo del megnetómetro, incluyendo los errores de medida y de desalineado será inferior de 1º
H2.3 El error máximo para los sensores de temperatura serán lo suficientemente bajos como para asegurar el requerimiento H2.1. El intervalo de temperatura a medir se determina de acuerdo con el mismo requerimiento.
H2.4 Se determinará la sensibilidad de los sensores solares cuando son expuestos a la luz solar extraterrestre.
H2.5 Se determinará un coeficiente de temperatura para los sensores solares, que se usará para la compensación de temperatura.
H2.6 Para cumplir el requerimiento H2.2 se desarrollarán procedimientos de calibración para el magnetómetro cuando esté integrado en el modelo de ingeniería y de vuelo, y reducir los efectos de desalineado y distorsiones magnéticas.
Requerimientos del microcontrolador
H3.1 El microcontrolador que interconexiona los sensores muestreará los datos de los 3 tipos de sensor
H3.2 Cuando sea solicitada el microcontrolador enviará la información de los sensores del bus I2C al OBC.
H3.3 El microcontrolador interconectará los actuadores y ejecutará los algoritmos de control.
H3.4 Para propósitos de pruebas será posible implementar versiones EPROM del microcontrolador en el prototipo y en la versión del modelo de ingeniería del circuito impreso del ADCS.
4.2.2 Algoritmos del ADS en el OBC
En el capítulo 2 se establecieron los requerimientos para el análisis de la determinación de la posición del satélite. Aquí la precisión de la dirección del ADCS se estableció en 8º
Requerimientos de los algoritmos en tiempo real
S1.1 EL algoritmo ADCS que se desarrolla en el OBC será ejecutado periódicamente en intervalos de 1 segundo.
S1.2 Vía el bus I2C solicitará, recibirá y guardará la información de las lecturas de los sensores y las medidas de corriente de los bobinados.
S1.3 Recibirá las solicitudes del DHCS pidiendo información y responderá con información
S1.4 Recibirá y guardará las lecturas de los paneles solares del DHCS.
S1.5 Recibirá y responderá a las peticiones de cambio de modo de funcionamiento del DHCS.
Configuración del ADS
S2.1 Será posible guardar nuevos TLE para ser utilizados en el modelo orbital.
S2.2 Será posible especificar si un sensor no va a ser utilizado en la determinación de la posición (lista negra)
S2.3 Será posible especificar si el magnetómetro utilizará la técnica de set-reset.
S2.4 Será posible cargar 6 nuevos factores de calibración para los 6 sensores solares primarios.
S2.5 Será posible cargar 5 nuevos factores de calibración para los paneles solares.
S2.6 Será posible cargar un total de 6 nuevos factores de calibración para los 3 ejes del magnetómetro (escalado y compensado).
S2.7 Será posible desconectar el algoritmo de corrección de albedo
S2.8 Será posible actualizar el valor del umbral de luz solar para determinar si el satélite está en eclipse.
Requerimientos para el procesado de las mediciones
S3.1 Los datos muestreados de los sensores térmicos se convertirán en valores de temperatura
S3.2 Los datos muestreados de los sensores solares se calibrarán para compensar las variaciones fotosenritivas.
S3.3 Los datos muestreados de los paneles solares se calibrarán para compensar las diferencias fotosensitivas con respecto a los sensores solares primarios.
S3.4 Se realizará una compensación de los datos de los sensores o de los paneles solares.
S3.5 Los datos del magnetómetro se calibrarán para compensar la constante del campo magnético de la estructura y asegurar el requerimiento H2.2.
S3.6 El ADS transformará los datos medidos a unas mediciones vectoriales que describan la dirección del Sol y del campo magnético terrestre, para usarse luego en la determinación de la posición, sin violar el requerimiento H2.3
Requerimientos de modelos de referencia de abordo
S4.1 El satélite tendrá conocimiento de la posición en el sistema ECI utilizando un modelo orbital de abordo, que incluye unas configuraciones actualizadas de TLE. El error del modelo orbital utilizando el TLE durante una semana no excederá los 100 Km fuera de la posición.
S4.2 Un modelo de campo magnético abordo determinará la dirección del campo magnético en la posición del satélite con un error de RMS inferior a 1º.
S4.4 Una corrección de ablbedo compensará el hecho de que la medida vectorial del Sol incluye la luz del albedo de la Tierra. Esta corrección funcionará lo suficientemente bien como para asegurar que la posición pueda ser determinada dentro de 8º por pulgada en el cálculo determinístico de la posición.
Requerimientos de la determinación de la posición
S5.1 Utilizando la solución determinística se determinarán la posición y las velocidades angulares respecto al sistema ECI. El error máximo de determinación de la posición estará dentro de 8º
S5.2 La solución determinística será capaz de suministrar datos en casos de indisponibilidad temporal o colinearidad utilizando la última posición calculada como valores actuales.
S5.3 Utilizando el filtro Kalman extendido se determinarán la posición y las velocidades angulares del satélite con respecto al sistema ECI con un error máximo de 8º. Esto tembién incluye la capacidad del ADS de cambiar de la solución determinística al filtro Kalman.
S5.4 La determinación de la posición, en combinación con el control de la posición, asegurará una exactitud en la dirección de 8º.
4.3 Especificaciones de las pruebas
Tienen el propósito de especificar qué condiciones cumplirán los test. Sin embargo, las especificaciones no entran en detalles relacionadas con procedimientos de pruebas y de laboratorio comunes. Las especificaciones de prueba también funcionan como una guía de cómo comprobar si se cumplen los procedimientos.
4.3.1 Test del Hardware
Requerimientos generales
Th1.1 El hardware del ADCS (no se incluye el OBC) debe ser pesado para cumplir el requerimiento H1.1
TH1.2 El consumo del hardware del ADCS deberá ser medido cuando se recojan datos del sensor y las señales de control sean generadas para los bobinados, correspondiente al modo de cámara. El consumo será también recogido cuando no tenga lugar ningún muestroe de datos ni ninguna actuación correspondiendo esto al modo a prueba de fallos. El consumo no excedería el requerimiento H1.2
TH1.3 Se comprobará que el hardware del ADCS no vulnera el requerimiento H1.3. Esto se hace cuando se implementa la versión del modelo del subsistema de ingeniería y vuelo del ADCS en la estructura del satélite con otros subsistemas.
TH1.4 El modelo de ingeniería con todos los subsistemas integrados, se ensayará con respecto a temperaturas, vacío, golpes, radiaciones y variaciones repentinas.
TH1.5 No se hará ningún test para validar si el requerimiento H1.5 concerniente a la liberación de gases se cumple. Se evita el empleo de cualquier tipo de componente que pueda causar esto.
Requerimientos de los sensores
TH2.1 La precisión de los sensores solares se comprueban buscando información de puntos en la característica coseno para los sensores y comparando con una curva coseno perfecta. Los sensores son expuestos a una luz entrante mientras se obtienen los datos de ellos. La orientación de los sensores probados varía por lo que el ángulo entre la luz entrante y la normal al sensor varía ±90º. No se simula el albedo en ninguno de estos tests y los sensores solares se comprueban con una sola fuente de luz.
Prototipo: Los sensores solares se rotan en un plato giratorio. Por cada 5º se obtiene una secuencia de datos de los sensores utilizando el microcontrolador. A los datos del microcontrolador se acceden usando un PC. Sólo se van a comprobar una pareja de sensores y sin montarse en sus alojamientos. El error del sensor solar, cuando se comprueba el prototipo no incluye la desalineación , para cumplir con el requerimiento H2.1. El test no incluye compensación de temperatura, por lo que los tests deberán de ser realizados cuando la temperatura no varíe más de ±1ºCelsius.
Ingeniería y modelo de vuelo: Todos los sensores solares primarios están montados en la estructura del satélite. La estructura se rotará 360º con respecto a una fuente de luz constante a la cual se expondrán 4 de los sensores solares a diferentes ángulos que varían entre ±90º. Es necesario conocer la rotación del satélite para cada muestreo de los datos del sensor, para esto se usarán como referencia los datos del magnetómetro calibrado. Los datos del sensor se muestrean con el microcontrolador y se almacenan en el OBC. Cuando se ha realizado una rotación exponiendo a los 4 sensores a la luz, la estructura está girada 90º y se realiza una rotación exponiendo también a los 2 sensores solares restantes a la luz. Los datos pueden a la vez ser obtenidos de los paneles solares, y por tanto dando una idea de su funcionamiento como sensores solares secundarios.
TH2.2 La precisión especificada en el requerimiento H2.2 para el magnetómetro se comprueba por medio de un procedimiento de calibración utilizando la técnica de Set-Reset. El magnetómetro se hace girar en el plano x-y y en el x-z ó y-z mientras se obtienen datos. Después de que se haya efectuado la rotación los datos obtenidos se procesan en MatLab. Los factores de escala para los ejes x,y y z se hallan conjuntamente con las desviaciones causadas por los campos magnéticos constantes de la estructura del satélite y de otros subsistemas. Los datos calibrados para las rotaciones en los 2 planos deberían dar círculos completos. Los errores del magnetómetro serán datos obtenidos que se desvían de esos círculos.
Prototipo: El test del prototipo del magnetómetro sirve para validar su funcionalidad y su precisión. Los datos obtenidos con el microcontrolador interconectado a los sensores no tienen que ser transferidos al OBC cuando se comprueba el circuito prototipo. Los datos del microcontrolador se obtienen usando un PC.
Ingeniería y modelo de vuelo: Primero es necesario asegurar que los 3 ejes de los componentes HMC1001 y HMC1002 de los sensores están montados perpendicularmente entre sí. Si no ocurre así se deberían hacer correcciones para asegurar esto. Segundo, se realizará un procedimiento de calibración para encontrar las constantes de calibración y eliminar así la distorsión magnética causada por los campos magnéticos constantes del satélite. Es importante que las rotaciones del magnetómetro se realicen con un eje constante de rotación. También es importante que el campo magnético medido no cambie de intensidad o dirección durante el test. El test se realizará con todos los subsistemas integrados del satélite. La orientación inicial del satélite, con respecto al campo magnético que lo rodea, se conocerá con el propósito de determinar cualquier rotación entre el magnetómetro y el sistema SCB. El procedimiento de calibración para el magnetómetro se realizará en los planos x-y, x-z y y-z.
TH2.3 Deberán comprobarse la precisión de los sensores de temperatura dentro del rango especificado. Los datos de temperatura recogidos se comparan con las medidas recogidas de un termómetro.
Prototipo: Los datos recogidos con el microcontrolador interconectado a los sensores no se tienen que transferir al OBC cuando se comprueba el circuito prototipo. Los datos del microcontrolador se introducen usando un PC.
Ingeniería y modelo de vuelo: Los sensores de temperatura se montan en alojamientos junto con los sensores primarios en la estructura del satélite. Las comprobaciones se realizarán mientras se recogen y se almacenan los datos de temperatura como datos de estado, cuando se expone al satélite a temperaturas en el rango indicado. Las temperaturas se comparan con las temperaturas medidas con un termómetro (precisión de ±1ºC). Cada vez que se mide una temperatura con el termómetro un sensor solar debería ser expuesto a un destello de luz. Esto sirve para encontrar el dato de temperatura correspondiente en los datos internos, cuando se examinan los datos después del test. El termómetro debería de ir escalado en intervalos de temperatura de 5ºC.
TH2.4 Prototipo: La foto sensibilidad de los sensores solares cuando se exponen a la luz solar extraterrestre se determinará exponiendo a los sensores a la luz con un espectro de luz similar. Los datos se recogen del sensor. Este test sólo se necesita para unas pocas celdas fotovoltaicas del tipo usado en los sensores solares, y se realizará antes del diseño y la producción del circuito de ingeniería y modelo de vuelo. El test determinará el rango de salida de los sensores solares.
Modelo de ingeniería: Se determinará la foto sensibilidad de cada sensor solar montado en la estructura del satélite, con la finalidad de establecer los factores de calibración para los sensores solares. Esto se consigue observando los valores pico de los datos de los sensores solares en el test especifocado por TH 2.1.
TH2.5 El coeficiente de temperatura de los sensores solares se halla exponiendo a unos sensores solares a una luz constante, mientras se varía la temperatura de -40ºC a +80ºC. Entretanto se recogen los resultados de los sensores solares y se introducen en un PC. Este test sólo es necesario para unas pocas celdas fotovoltaicas del tipo utilizado en los sensores solares.
Requerimientos del test del microcontrolador.
TH3.1 El requerimiento H3.1 está completo si los test TH2.1 a TH2.3 se llevan a cabo satisfactoriamente.
TH3.2 El requerimiento H3.2 está completo si los test TH2.1 a TH2.3 se llevan a cabo satisfactoriamente. Para el el prototipo de hardware ADCS, se ha decidido comprobar sólo que la comunicación es posible en el bus IC. No es necesario comprobarlo enviando datos recogidos del sensor.
4.3.2. Test de los algoritmos
El propósito de los test de los algoritmos de abordo es verificar su funcionamiento. Se consigue comparando los resultados de los algoritmos con cualquier dato real o valor utilizado en una simulación. El error de los algoritmos modelo se calcula finalmente como un error angular entre el dato real o el más óptimo y los resultados proporcionados por los algoritmos y modelos.
Requerimientos del test de la cadena en tiempo real
TS1.1 La ejecución periódica de la cadena ADCS, de acuerdo con S1.1, se comprueba siguiendo las secuencias en los datos internos a partir del test de los sensores.
TS1.2 El requerimiento S1.2 se cuple si el test TS1.1 se lleva a cabo satisfactoriamente. Aparentemente no parecerá que haya pérdida de datos, y los datos del sensor deberán evolucionar según lo esperado.
TS1.3 Si el DHCS puede recoger datos de la secuencia del ADCS, éste se habrá probado. La recogida de datos deberá llevarse a cabo durante un periodo de tiempo largo (horas, días)
TS1.4 En las posibilidades de configuración todos los sensores solares estarán desactivados. Entonces se determinará una posición utilizando los datos del panel solar. Esto se comprueba más fácilmente con una solución determinística.
TS1.5 El ACDS responderá en el registro de datos interno correspondiente al modo en el que esté en funcionamiento.
Test – Configuración del ADS
TS2.1 Los diferentes test conectados a la configuración del ADS y concerniente a la funcionalidad de las diferentes opciones mencionadas en el requerimiento de S” se probará como una parte de la comunicación con el CDHS. Todos estos requerimientos se probarán uno por uno durante la integración del ADS en el OBC.
Test – Requerimientos del proceso de medida.
TS3.1 Las conversiones de los datos medidos a valores de temperatura dados en los requerimientos S3 se comprueban aplicando las entradas conocidas al ADS para simular los datos del sensor, y leyendo los datos obtenidos. Este resultado se verifica de acuerdo con su relación con los datos entrantes.
Test – Requerimientos para los modelos de referencia de abordo
TS4.1 Modelo orbital: El modelo orbital utilizado para el modelo verdadero y para el modelo orbital de abordo se probará utilizando los parámetros TLE y los datos de posición del satélite Oersted. Las configuraciones TLE existentes para Oersted se utilizan para los modelos orbitales. Las posiciones calculadas del satélite en este intervalo de tiempo se compara con los datos de posición medidos por GPS del satélite Oersted en el mismo intervalo de tiempo. Por lo tanto los dos modelos orbitales se validan incluyendo el error, que ocurre cuando se usa los mismos parámetros durante una semana sin ninguna actualización. Aquí se deben cumplir los requerimientos relativos a la precisión dados en el requerimiento S4.1
TS4.2 Modelo del campo magnético: Se probarán el modelo de campo magnético de abordo y un modelo para simular el campo magnético real con los datos del satélite Oersted. Esto se consigue obteniendo los datos de la posición del Oersted obtenidos por los satélites GPS como datos para los modelos del campo magnético. La dirección e intensidad del campo magnético medido por el Oersted en el mismo recorrido orbital se comparan con los resultados de los modelos de campo magnético. El requerimiento S4.2 tiene que cumplirse para el modelo de campo magnético de abordo utilizado en el satélite.
TS4.3 Modelo solar: El modelo solar de abordo y el utilizado para determinar la dirección real al Sol en las simulaciones se comprobarán comparando los resultados para los modelos solares existentes.
TS4.4 Corrección del albedo: Los errores en el RMS causados por el albedo de la Tierra en los sensores solares tendrán que ser simulados. Se introducirá una corrección del albedo y el error resultante en el RMS se determina por simulación. Estas simulaciones se realizarán con el satélite dirigido según los modos de ahorro de energía y módo de cámara. Para el modo de ahorro de energía una esquina del satélite apuntará al Sol, y para el modo de cámara, el satélite apuntará la cámara hacia la Tierra y lejos del Sol.
Test – Requerimientos para la determinación de la posición
TS5.1 Determinación determinística de la posición: Para probar el funcionamiento de la determinación determinística se utilizarán los siguientes escenarios. La determinación de la posición cumplirá el requerimiento S5.1.
a) Primero, verificar que funciona la determinación determinística, determinando la rotación entre 2 pares de vectores, que han sido girados con una rotación conocida. Segundo, se realiza el mismo test con un error añadido a uno de los vectores, correspondiente al error de albedo esperado.
b) Se realizará una simulación del satélite en órbita, donde se utilice la determinación determinística sin errores de albedo en los sensores solares. Debido a la inclinación del eje de rotación de la Tierra, el riesgo de colinearidades entre el vector solar y el vector del campo magnético terrestre será mayor en la vecindad de Dinamarca en el mes de junio.
c) Se realiza de nuevo el test TS5.1.1b se realiza de nuevo pero esta vez con errores de albedo en los sensores solares y la corrección de albedo para minimizarlos.
TS5.2 Colinearidades de los vectores de campo magnético y solar: Se comprueba el requerimiento S5.2 en los escenarios TS5.1b y TD5.1c
TS5.3 Filtro Kalman extendido: La determinación de la posición utilizando el filtro Kalman extendido se comprueba en los siguientes escenarios. Los escenarios corresponden a la operación primaria y terciaria, descritas en la sección 3.5. El propósito de los test no es sólo probar el filtro Kalman extendido, sino también hacer un ajuste preciso. Esto se hace como parte de las simulaciones descritas a continuación.
La dinámica del satélite, los pares de perturbación, la posición orbital, el campo magnético y la dirección al Sol se simularán y se introducirán como datos en la determinación de la posición. Se simularán también los errores de los sensores solares y del magnetómetro.
a) Se realiza una simulación correspondiente a la operación terciaria, en la cual sólo se utiliza el filtro Kalman. Para la posición inicial se establece un error de 180º. Durante toda la simulación se utilizan tanto los sensores solares primarios como el magnetómetro.
b) Se realizará una simulación similar a TS5.3 con la única diferencia de que no se emplean sensores solares. Esto es para observar cómo converge el filtro sin datos del sesnor solar.
c) Se realizará una simulación de la operación primaria, donde el filtro Kalman utilizalos estados iniciales hallados junto con la determinación determinística.
d) La solución determinística y la determinación de la posición utilizando el filtro Kalman serán combinadas con el control de la posición, y las simulaciones utilizando las operaciones primaria, secundaria y terciaria y se aplicará para la determinación de la posición y el sistema de control completo. El requerimiento S5.4 se completará para el sistema completo de determinación y control de la posición.
Hardware de determinación de la posición
Este capítulo describe la implementación de 3 sensores diferentes
utilizados para la determinación de la posición. Un magnetómetro de 3 ejes
para la medida del campo magnético terrestre, 6 sensores solares
cosenoidales para medir la dirección del Sol y 6 sensores de
temperaturapara medir la temperatura de los sensores solares.
5.1 Visión general del Hardware
Se puede ver a continuación un diagrama de bloques del hardware utilizado
para la determinación y control de la posición. Se divide en un detector,
electrónica de interconexión, el microcontrolador PIC y el OBC (ordenador
de abordo). La determinación de la posición se ejecuta en el OBC y utiliza
los datos de los sensores calculados con el micro controlador PIC generando
señales de control a las bobinas.
para la determinación y control de la posición. Se divide en un detector,
electrónica de interconexión, el microcontrolador PIC y el OBC (ordenador
de abordo). La determinación de la posición se ejecuta en el OBC y utiliza
los datos de los sensores calculados con el micro controlador PIC generando
señales de control a las bobinas.

5.2 Sensores solares

detectar la dirección del Sol. Para este propósito se utilizan fotodiodos
de silicio como detectores solares, para generar una corriente proporcional
a la luz incidente. De acuerdo con Centrovision 2002, el diagrama del
circuito equivalente de un fotodiodo será:
(Embedded image moved to file: pic20774.jpg)
Ip representa la corriente proporcional a la luz incidente. Rs es la
resistencia serie del fotodiodo y Rsh es la resistencia de la unión del
diodo. Cj es la capacitancia del fotodiodo. La operación de los fotodiodos
en modo fotovoltaico con una gran resistencia de carga resultará en una
respuesta de salida no lineal, que depende mucho de la temperatura. El
funcionamiento en inversa de los fotodiodos permitirá alta velocidad y
respuesta lineal, pero aumentará la corriente de fuga resultando en un
aumento del riesgo de ruido. Se ha escogido operar con los fotodiodos ...,
donde la resistencia de carga constante del circuito de interconexión es
significativamente menor que la resistencia de corte del fotodiodo. Esto
conllevará una salida linealproporcional a la luz incidente y el ruido
generado será principalmente ruido Johnsondebido a la casi total
eliminación de la corriente de fuga a traves de Rsh.
5.2.1 Radiación Solar

En la imagen se puede ver una muestra de la radiación solar extraterrestre
y de la radiación solar al nivel del mar. La constante solar es la media
del flujo de energía solar en una unidad astronómica. En realidad no es una
constante, sino que varía alrededor de un 3,4% durante cada año a causa de
la órbita elíptica de la Tierra alrededor del Sol. Además la radiación
emitida desde el Sol varía en un ciclo de 11 años. El flujo de energía
solar a través de la atmósfera terrestre es igual al area bajo la curva de
irradiación espectral solar extraterrestre de la figura. La constante solar
por defecto a 1 UA es 1371 W/m2 y el flujo máximo de energía solar es 1428
W/m2 durante el solsticio de invierno.
(Embedded image moved to file: pic20312.jpg)
5.7 Especificaciones de los sensores.

del modelo de vuelo, se especifican las especificaciones siguientes del
sensor para cada uno de las tres versiones del hardware. Las
especificaciones para las señales de salida de los sensores se definen en
el bus de I2C. Esto significa que los algoritmos puestos en ejecución en el
microcontrolador de PIC influyen en las especificaciones.
5.7.1 Especificaciones de los sensores para el prototipo.
Las pruebas de la validación del hardware para los sensores en el prototipo
se pueden encontrar en los apéndices L, K y M. El microcontrolador de PIC
es una unidad que proporciona la información de los tres tipos del sensor.
Las señales de salida de los sensores se especifican mientras se leen los
valores en el bus de I2C. Las lecturas de los sensores serán parte de los
datos del estado del satélite que serán enviados del microcontrolador de
PIC.
(Embedded image moved to file: pic22102.jpg)
5.2.2 Detectores solares
Se utilizarán fotodiodos planares de silicio marca Silonex para detectar la
radiación solar. Estos fotodiodos tienen un rango de sensibilidad espectral
de 400nm a 1100nm y la longitud de onda máxima de sensibilidad es de 930nm.
La corriente de cortocircuito típica se especifica como 170 microA con una
energía de entrada de 25mW/cm2 de una fuente de cuerpo negro a 2854K. Sin
embargo la radiación solar extraterrestre se asemeja más a la radiación de
un cuerpo negro a una temperatura de 5800K. A través de pruebas en los que
los fotodiodos son expuestos a la luz solar terrestre, la máxima corriente
de salida de los fotodiodos es de 1,3mA. Pruebas simulando la luz del sía
con lámparas indicaban una señal máxima de aprox. 0,52mA. De estos
resultados se espera una corriente máx. de cortocircuito de 1,3mA.
La dependencia de la temperatura de los diodos de silicio planos se estima
en 0,23%/C de la corriente de cortociruito generada. Como habrá una gran
diferencia de temperatura entre un sensor solar entrando en la zona de luz
desde la sombra y un sensor solar que ha sido calentado a la luz solar
durante un periodo largo de tiempo, es necesario medir las temperaturas de
los sensores solares.
5.2.3 Interconexión del detector solar


se muestran en la figura. La corriente de cortocircuito del fotodiodo se
convierte a tensión continua de 0V a 5V.
(Embedded image moved to file: pic25736.jpg)
Debido a las incertidumbres en la determinación de la señal máxima de los
fotodiodos, la amplificación en la interconexión se dimensiona para una
corriente del rango de 0 a 1,7 mA. Esto quiere decir que la interconexión
está dimensionada para una corriente máxima de aprox. 23% mayor que la
máxima corriente determinada en el test. Los voltajes de salida de las
interconexiones de los 6 sensores solares son multimplexados y muestreados
con un convertidor analógico digital de 12 bit.
Si la máxima señal de los fotodiodos es inferior a lo esperado en una
cantidad de 0,52microA sólo se utiliza el 32% del rango de los
convertidores A/D (32% de 2 elevado a 12=1305). Esto dará como resultado
una resolución angular de 1 grado y muy inferior al error esperado en los
sensores solares debido al albedo (ver fórmula):
(Embedded image moved to file: pic30524.jpg)
5.2.4 La evaluación del sensor solar


de sol cuando está expuesta a la luz del sol extraterrestre, es compensada
bajando la amplificación de la señal y aceptando una resolución más baja de
los datos muestreados del sensor de sol.
El error en un sensor solar, debido a un error de la temperatura de 5ºC, es
(Embedded image moved to file: pic03952.jpg)
Se determina el error angular usando la ecuación 5.2 donde el error posible
máximo en un sensor de sol se considera perpendicular a la señal de otro
sensor de sol.
(Embedded image moved to file: pic21976.jpg)
El coseno característico de los fotodiodos se prueba en el apéndice K,
segúnla especificación TH2.1. El error máximo comparado con una curva
perfecta cosenoidal es de 3.5º y el error del RMS 1.84º. En vista del
error debido a la característica del coseno y a la dependencia de la
temperatura, es posible satisfacer el requisito H2.1 de 4º usando una
compesación de la temperatura con una precisión mayor de mas menos 3º C.
Esto significa que el error del desalineamiento, al montar los sensores
solares en los modelos de diseño y vuelo, debe ser menor que 0.1º. Si los
errores del desalineamiento son más altos de 0.1º, debe todavía ser probado
si el requisito H2.1 puede ser satisfecho. El error angular determinado en
la ecuación 5.2, es una aproximación del error máximo. El ruido de los
sensores solares se especifica enel bit del A/D-converter y se encuentra
para una señal máxima de los sensores de sol en el apéndice I. El ruido
tiene un valor máximo de 100 bit y se aproxima para dar lugar a un error de
1.5º. El ruido es blanco y será reducido muestreando 16 valores en los
sensores de sol y después encontrando el valor medio. Esto se hace en el
microcontrolador de PIC. Notar que esto no ha sido puesto en ejecución y no
se ha probado para el prototipo, pero se espera reducir el ruido por un
factor 16.
5.3 Los sensores de temperatura
Los sensores de temperatura se ponen en ejecución para medir las
temperaturas de los sensores de sol para compensar las dependencias de la
temperatura de los fotodiodos del silicio. Las temperaturas tendrán gran
influencia en las señales de los sensores solares, cuando un sensor de sol
viene de la sombra y entra en la zona de luz.
5.3.1 El intervalo de temperatura
Las temperaturas previstas para los sensores solares se extenderán a partir
de -70ºC hasta +90 ºC. El intervalo de la temperatura que se medirá se
limita a -50ºC hasta 85ºC mientras que la precisión se limita a bajas
temperaturas debido a la característica no lineal del termistor (véase la
sección 5.3.2). Como el sol calentará los sensores solares hacia el sol, es
exacta a temperaturas positivas que son de importancia para las
correcciones de temperatura de las lecturas del sensor solar.
5.3.2 Los termistores

termistores de NTC tienen un gran coeficiente de resistencia de temperatura
negativa. El tipo de dispositivo elegido es un tipo permutable revestido de
epoxy pequeño 10k3A1A de los termistores de BetaCurve en las series I de
BetaTherm (BetaTherm, 2002). La intercambiabilidad significa que cada
dispositivo está garantizado para emparejar las características publicadas
de la resistencia-temperatura dentro de la desviación especificada
(tolerancia del más menos 0,1º C) sobre la gama de temperaturas 0º C a 70º
C. La capacidad de intercambio quita la necesidad de determinar una
temperatura característica para los termistores individuales y simplifica
por este medio la integración en la estructura del satélite. La
característica de la resistencia-temperatura del termistor es no lineal. Se
puede calcular un valor de la temperatura a partir de la resistencia usando
el algoritmo del termistor del Steinhart-Hart en la ecuación 5.3 y, y de
valores A, B y C especificados para el termistor. La ecuación 5.3 se
verifica con los valores de la resistencia para cada grado de la
temperatura en la gama de -50º C a 150º C especificada de BetaTherm
(BetaTherm, 2002).
(Embedded image moved to file: pic03988.jpg)
5.3.3 El interfaz del termistor

dependiente del divisor de tensión, en el cual el voltaje aumenta con la
temperatura. Para evitar un calentamiento del termistor, se aplica al
divisor de tensión una baja tensión de 1.2V .
(Embedded image moved to file: pic09575.jpg)
Los voltajes de salida de los 6 circuitos amplificadores para las medidas
de la temperatura se multiplexan y después se convierten a un valor digital
de 12 bit.
5.3.4 Evaluación del sensor de temperatura.
La salida de los sensores de temperatura es no lineal y se convierte a una
temperatura usando la ecuación 5.3 del Steinhart-Hart. La exactitud de los
sensores de temperatura para el prototipo se prueba, según TH2.3, según lo
descrito en el apéndice M, y los errores parecen ser inferiores a más-menos
3º C en el intervalo [ - 30... 85]ºC, al calibrar con una compensación de
-1º C. Esto significa que si los errores del desalineamiento se mantienen
en un punto bajo al montar los sensores de sol, como se especifica en la
sección 5.2.4, el requisito H2.3 se satisface.
El ruido en las medidas de la temperatura está en el nivel de un bit en el
A/D-converter. Las desviaciones se dieron en las medidas. El efecto de las
desviaciones será reducido muestreando cada sensor de temperatura 16 veces
y encontrando el valor medio. Esto se hace en el microcontrolador de PIC.
Notar que esto no ha sido puesto en ejecución y no se ha probado para el
prototipo, pero se espera reducir el tamaño de las desviaciones en un
factor 16.
5.4 El magnetómetro de 3 ejes



magnético de la tierra con respecto al satélite. Las distorsiones del campo
magnético pueden incidir en la estructura del satélite y de otros
componentes , y esto debe considerado.
5.4.1 Campo magnético terrestre.
La intensidad el campo magnético de la tierra se estima a una altitud de
700 kilómetros en una órbita síncrona del sol que esté dentro de 0.5 gauss.
Esto se verifica con las simulaciones del campo magnético de la tierra
usando un modelo geomagnético internacional del campo de referencia (IGRF).
Los resultados de estas simulaciones se demuestran en el apéndice N. La
estructuradel satélite o los subsistemas puede producir campos magnéticos y
afectar a las medidas del campo magnético. Esto se conoce como distorsión
magnética. Las distorsiones magnéticas se pueden categorizar como el hierro
duro y efectos suaves del hierro. La distorsión del hierro duro es causada
por los imanes permanentes, el hierro magnetizado o el acero colocados
cerca del magnetómetro, e introducirá una desviación constante en el campo
magnético medido. Esta desviación se puede determinar usando un
procedimiento de calibración cuando el satélite está montado. La distorsión
suave del hierro se presenta de la interacción del campo magnético y de
cualquier material magnético suave de la tierra que rodean el magnetómetro.
La cantidad de distorsión del hierro suave depende de la orientación del
magnetómetro. Es también posible realizar una calibración para la
distorsión suave del hierro, o puede ser posible reducirla blindando sus
fuentes.
5.4.2 Los sensores magneto-resistivoss (MR.)
Para detectar el campo magnético en tres ejes se utilizan los componentes
HMC1001 y HMC1002 de Honeywells (HMC1001-2, 1999). HMC1001 contiene un
sensor usado para medir el eje Z y HMC1002 contiene dos sensores
perpendiculares para medir el X y el Y. El material de detección de los
sensores MR. en cada eje se hace de un material resistivo modelado para
formar un puente resistor de Wheatstone, como el que está ilustrado en el
cuadro 5.6. Cuando un campo magnético se aplica a lo largo del eje sensible
del sensor, la resistencia en el puente cambiará, y así lo hará el voltaje
de la salida.
(Embedded image moved to file: pic30379.jpg)
Los sensores MR de Honeywell introducen en el chip straps set/reset y de
offset. La strap de offset se puede utilizar para eliminar los efectos de
la distorsión dura del hierro. Las strap de set/reset se utilizan para
reducir los efectos de la deriva de la temperatura, errores de
desalineación y la pérdida de señal de salida debido a la presencia de
altos campos magnéticos. Si se aplica un campo magnético de más de 3 gauss
a un eje sensible en los sensores HMC1001 y HMC1002, la polaridad de la
película del permalloy se puede trastornar o mover, y el resultado es un
cambio de las características del sensor. Las características del sensor
pueden ser restauradas aplicando un campo a lo largo del eje sensible,
usando straps de set/reset. Al aplicar un voltaje de puente de +5V Vbridge
y con pulsos de 3A S/R los sensores tienen una sensibilidad típica de 16
mV/Gauss.
(Embedded image moved to file: pic14256.jpg)
Cuando un pulso de corriente SET se conduce del pin de SR+ en la strap de
set/reset la respuesta de la salida es la curva con la pendiente positiva
en el cuadro 5.7 (HMC1001-2, 1999). Cuando un pulso de corriente RESET se
conduce del perno del SR-, la respuesta de la salida es la curva con la
pendiente negativa. Las dos respuestas se reflejan sobre el origen, a
excepción de una desviación del puente y de una desviación externa. La
desviación del puente es debido a la unión mal hecha del resistor en los
puentes de wheatstone durante la fabricación. La desviación externa puede
ser debida a los objetos ferrosos próximos o a los campos magnéticos que
interfieren con el campo que se medirá. El campo magnético es medido
primero conduciendo un pulso del SET a través de un sensor y después
leyendo la salida del sensor Vset cuando se ha instalado. Entonces un pulso
de RESET se conduce a través de un sensor y se lee la salida del sensor
Vreset. Esta técnica se llama "conmutación de set/reset" y el campo
magnético aplicado se puede encontrar el usar de la ecuación 5.4.
(Embedded image moved to file: pic19244.jpg)
Las desviaciones del puente, de la temperatura y de la electrónica del
interfaz se descuidan al usar "la técnica de la conmutación de set/reset".
La desviación externa de la distorsión dura del hierro debe ser quitada
realizando una calibración cuando el satélite está montado. La compensación
de la distorsión suave del hierro debe ser reducida al mínimo colocando el
magnetómetro lejos de los materiales magnético suaves y blindándolo de
fuentes de la distorsión suave del hierro.
Suscribirse a:
Entradas (Atom)