2.1 Objetivos de la misión
El desarrollo del AAU CubeSat es llevado a cabo por un número de grupos de proyecto que tienen la responsabilidad de diseñar y desarrollar los diferentes subsistemas.
Objetivos:
- Tomar fotografías de la Tierra desde una órbita baja (LEO) en aprox 700 Km de altura. Se usará una cámara CMOS. Tomará fotos en color en el espectro visible. Las fotografías serán transmitidas a la estación de tierra y se publicarán en internet. El ámbito de cobertura de las fotografías se restringen a Dinamarca.
- Aumentar el interés público en las ciencias del espacio.
- Obtener experiencia para futuras misiones
- Observación de las estrellas. Monitorizar las estrellas de forma eficiente requiriría un análisis de los datos de la cámara, difícil de implementar en un CubeSat.
2.2 Ciclo de vida
- Pre-lanzamiento: Comienza cuando el desarrollo y testeado del satélite ha sido completado y éste transportado a Kazagstán. Antes del lanzamiento los tests serán desarrollados para asegurar que funciona, y que cumple con los requerimientos establecidos en la Guía del carga del P-POD. En la etapa final de la fase de prelanzamiento el satélite se transporta al lugar de lanzamiento y se introduce en el P-POD, que ha sido montado en la plataforma del satélite del vehículo de lanzamiento. El P-POD es un mecanismo sencillo diseñado para lanzar el satélite. Durante el tiempo que el CubeSat está dentro del P-POD un interruptor mecánico asegurará que todos los subsistemas están sin energía eléctrica. Hasta el lanzamiento permanecerán sin energía.
- Lanzamiento: EL vehículo de lanzamiento será un cohete tipo Dnepr. Después de la fase de Pre-lanzamiento la fase de lanzamiento llevará sólo pocas horas incluyendo las últimas preparaciones y el lanzamiento propio en el tiempo de vuelo.Puesta en servicio: Después de la puesta en órbita de la carga, seguirá la puesta en servicio de los satélites. La carga primaria, consistente en uno o dos microsatélites, se pondrán en servicio. Después de un retraso de minutos u horas seguirá la puesta en servicio de los CubeSats. Los P_PODs se abrirán uno por uno lanzando los 3 CubeSats al espacio. Despues del lanzamiento el CubeSat se auto-inicializará después de unos minutos.
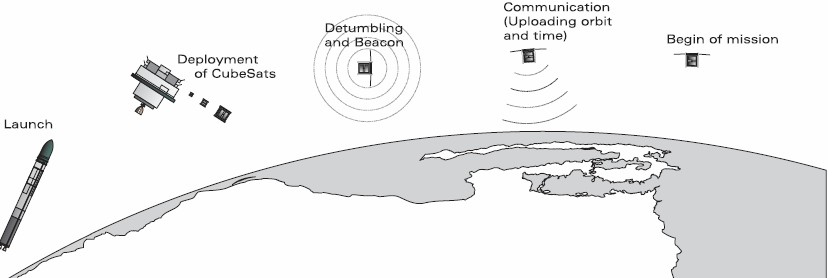
Este retraso es necesario con el propósito de adquirir cierta distancia del P-Pod y los otros CubeSats antes de la puesta en servicio de las antenas de comunicación. El computador de abordo se iniciará con una secuencia para los subsistemas. El subsistema de comunicación incluye una función baliza que será activada en este proceso y enviará una señal estándar baliza.
Cuando se ha inicializado el subsistema de control y determinación de posición, éste iniciará una maniobra de giro. Esta maniobra se realiza para frenar las rotaciones del satélite que has podido causar el lanzamiento. Cuando esta maniobra acabe el satélite apuntará los panales solares hacia el Sol para recoger tanta energía como sea posible. Tan pronto se establece la primera comunicación con el satélite, la baliza primaris se apagará y el satélite recibirá las propiedades de su órbita, para obtener conocimiento de su posición.
- Misión en órbita: El satélite recibirá un plan de vuelo, que incluye cómo se comportará en diferentes momentos. Autonómicamente éste cambiará su posición y en un momento específico tomará una foto del objetivo. Durante los siguientes pases sobre la estación de tierra los datos se retransmitirán y el satélite recibirá el plan de vuelo para la siguiente foto. Cuando el satélite no toma fotos tratará de economizar el consumo de energía. El satélite durante la misión estará expuesto a muchos efectos medioambientales. Estos van desde el vacío efectos de sobretemperatura y cambios importantes de temperatura hasta radiaciones electromagnéticas.
- Fin de vida y reentrada: El satélite será diseñado para tener una vida activa de al menos 1 año. Después de finalizada su funcionalidad, permanecerá en órbita como reiduo espacial. Finalmente arderá durante la reentrada, aproximadamente 20 años después de su lanzamiento, finalizando su existencia con un efecto visual menor en el cielo nocturno.
2.3 Descripción del sistema:
El sistema completo incluye el satélite y la estación terrestre para comunicación con el satélite. Éste se divide en los siguientes subsistemas:
- Estructura del satélite: Debe cumplir los requisitos establecidos por la OSSS (solución para satélite de una parada ¿?) y la Universidad de Stanford, que originalmente ha desarrollado el concepto de CubeSat. El tamaño del satélite será de 10 x 10 x 10 cms, mientras que su peso será inferior a 1 Kg. Para conseguir esto, se usarán materiales ligeros. Su diseño se basará en un bastidor de aluminio con sus caras hechas en fibra de carbono. Se han establecido altos requerimientos en relación a la estructura del satélite y su integridad, como su resistencia a altas temperaturas, que varía entre +80 y -40, vibraciones y chocques, radiaciones, y el vacío en el espacio. El grupo responsable de la estructura del satélite será tembién responsable del peso y del presupuesto.
- Suministro de energía: La unidad de suministro de energía (PSU) consiste en 4 baterías Li-Ion de 3,7 V y 5 pares de paneles solares de triple unión, que se disponen en la superficie de 5 de las 6 caras del satélite. La PSU proporciona a otros subsistemas un voltaje nominal de 5V y monitoriza el funcionamiento de los diferentes subsistemas relacionados con su consumo de energía. Aparte de ser utilizados para recolectar energía eléctrica los paneles solares se utilizan también como sensores solares de reserva para el ADS.
- Ordenador de abordo: Los subsistemas de abordo se controlan desde un ordenador de abordo central (OBC) del tipo C161PI de SIEMENS. Tiene una CPU de 16 bits y un espacio total lineal de 16Mb. Utilizará 2 tipos de memoria. Un módulo ROM para operaciones acumuladas y reservadas y un módulo RAM para el software del sistema, manejo interno y datos de carga. La comunicación entre el ordenador y los subsistemas se hará por medio de un bus, que se conectaráentre la unidad de suministro de energía, la determinación y control de posición, la cámara y la unidad de comunicación.
- Cámara: La carga útil será una cámara de abordo para obtener fotografías. Utiliza un chip de una cámara digital CMOS basada en un Kodak kac1310 de 1,3 megapixels, que ha sido suministrada por DEVITECH. Tomará fotos de la Tierra con un campo de visión de 100 x 80 kms y una resolución de 1280 x 1024 pixels con una intensidad de color de 24 bits. La lente frontal de la cámara CMOS está hecha a mano con un diámetro de 20 mm con un largo de 50 mm.
- Unidad de comunicación: Para recibir telemetría de la estación terrestre así como para transmitir el estado de abordo y las fotos tomadas durante el vuelo, se usa una unidad de comunicación. En este caso la unidad de comunicación de abordo y la antena se compraron en OSSS y se comunicará con tierra utilizando frecuencias de radio amateur. La antena unida al satélite se desplegará después del lanzamiento desde el P-POD al espacio. Para poder comunicarse con el satélite desde tierra, se usará una antena seguidora (¿?) que seguirá el movimiento del satélite en el cielo
- Sistema de control y determinación de posición: Se usará para apuntar la cámara que está fija en la estructura del satélite. El ADCS es también necesario para apuntar tres de las caras del satélite con los paneles solares hacia el Sol para maximizar la entrada de energía. Esto también asegura que la cámara no se apunta directamente al Sol. El ADCS está dividido en 2 proyectos. Uno desarrolla el control relativo a la parte del subsistema ACS. Incluye los actuadores y los algoritmos de control. La otra parte es la determinación de la posición. Incluye sensores de desarrollo y algoritmos para determinación de la posición.
- Estación de tierra: Se localiza en Aalborg. Comunicará con el satélite y bajará las fotos y los datos de manejo. De la misma manera se cargarán los nuevos planes de vuelo y configuraciones desde la estación de tierra al satélite. La descarga completa de una foto llevará varias órbitas, ya que la descarga corriente a una velocidad de 9600 bits/seg llevará unos 20 min, y paso por Dinamarca en una órbita lleva 8 min.
2.3.1. Conexiones entre subsistemas
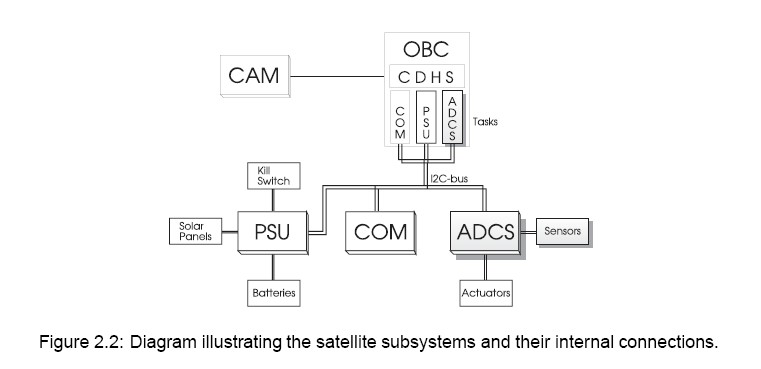
Los subsistemas se conectan como se indica en la figura 2.2. La cámara está conectada al ordenador por separado, mientras la comunicación entre el ordenador, la unidad de energía, la unidad de comunicación y el ADCS van a dar al bus IC.
La unidad de suministro de energía se conecta al interruptor principal, a las baterías y a los paneles solares, mientras que el ADCS cuelga a los sensores y a los actuadores.
El CDHS está instalado en el ordenador con la tarea de interconectar los subsistemas PSU, COM y ADCS. Cada una de las tareas recolecciona los estados de los subsistemas y envía las órdenes desde el CDHS a los subsistemas. Los datos provenientes de los subsistemas incluyen estatus e informes de error para ser almacenados, interpretados y actuar sobre la tarea del subsistema en el ordenador central.
La tarea para el ADCS implementada en el ordenador incluye los algoritmos para la determinación de la posición. Los algoritmos para el control de posición si implementan en un microcontrolador en el subsistema de ADCS. Ëste está conectado a actuadores y a sensores. El uso de esta estructura significa que los datos del sensor se incluirán en los datos del subsistema ADCS y se enviarán a la tares ADCS del OBC. En el OBC la posición se determinará basándose en los datos del subsistema. La diferencia entre la posición de rederencia y la posición actual se devolverá al subsistema ADCS donde se utilizará para el control de posición.
La principal pieza del software de determinación de posición será implementado en las operaciones de ADCS en el ordenador. Sólo se necesitan unos pocos algoritmos para muestrear los sensores en el microcontrolador del subsistema ADCS. El trabajo relacionado con el subsistema ADCS ha estado desarrollando y conectando los sensores y escribiendo el software para probar los sensores.
2.4 Precisión requerida en la orientación
Se usa una consideración muy sencilla para determinar los requerimientos para la precisión en la orientación del satélite. La precisión requerida cuando se tomauna foto se basa en el tamaño y en la resolución de la foto. La foto tomada a una altura de unos 700 Km sobre la superficie de la tierra cubrirá aproximadamente 100, 100 Kms. La desviación máxima del entro deseado para la foto al actual centro de la foto se decidió que sería de aproximadamente 100Kms. De acuerdo con estos parámetros una exactitud en la orientación se calcula según la ecuación siguiente:

Esta exactitud en la orientación es de 8º, de acuerdo con la exigencia principal del ADCS.
2.5 Los modos de operación del ADCS
El satélite depende del ADCS para cambiar su posición cuando realiza una foto o cuando optimiza la recolección de energía. Para obtener esto se han definido los siguientes modos de operación sobre el satélite:
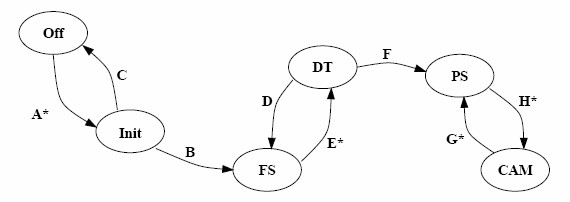
Inicialización, seguridad ante fallo, detumbling, ahorro de energía y modo cámara. Se muestra en la figura un diagrama de estado. El ADCS comienza en el estado Off. Las funciones marcadas con un * están unidas externamente por el OBC o PSU. El diagrama de estado muestra el flujo naural entre los estados en el ADCS. Aparte de esto haremos notar los siguientes puntos relacionados con el ADCS:
1.- Ante un fallo cualquier estado puede ir al estado OFF (reseteado suave)
2.- El sistema de mando y manejo de datos (CDHS) puede en cualquier momento forzar al ADCS a cualquier estado: Inicialización, seguridad ante fallo, detumbling, ahorro de energía y modo cámara.
3.- El CDHS y el PSU puede forzar al ADCS al estado OFF con un reiniciado del hardware o una desconexión de energía.
Inicialización (Init): Después de la puesta en servicio o en un reinicio la unidad de generación de energía enciende el subsistema ADCS A. Durante la este proceso se inicializan los sensores y actuadores en el ADCS. Los errores de la inicialización del hardware del ADCS se comunican como estado interno.
Seguridad ante fallo (FS): Cuando la inicialización Init está completada B el ADCS entra automáticamente al modo de operación de seguridad ante fallo (FS). En este modo el ADCS estará en standby hasta que un comando del CHDS le permite continuar E hasta el modo detumbling.
Detumbling (DT): En este modo el ADCS girará el satélite. Si el giro se completa con éxito o no se necesita ningún giro, el sistema continuará hasta F al modo de ahorro de energía. Si se produce un retraso en el modo detumbling el ADCS volverá D al modo de seguridad ante fallo.
Ahorro de energía (PS): En el modo de ahorro de energía PS el ADCS cambiará la posición del satélite, y por tanto de los 3 paneles solares dirigiéndolos hacia el Sol. Esto se hace para obtener una máxima entrada de energía . Cuando el satélite está en la sombra de la Tierra (eclipse), es importante que ese consumo de energía se mantenga en valor bajo en todos los subsistemas. En un momento planificado en el plan de vuelo, el satélite necesita cambiar la orientación para adquirir una foto, el CDHS ordena al ADCS cambiar al modo cámara H.
Modo cámara (CAM): En el modo cámara el ADCS cambiará la posición del satélite para tomar una foto. El ADCS recibirá la posición de referencia del CDHS. En el plan de vuelo se especificael momento en el que el ADCS irá al modo cámara, y cuando el CDHS tomará lafoto con la cámara. Después de que la foto se haya tomado G, el sistema volverá al modo de ahorro de energía PS.

Se ha decidido usar el plan de vuelo para especificar cuándo cambiar al modo cámara y cuándo abandonarlo. Este momento se calcula previamente en la estación de tierra usando un modelo orbital. Se muestra en la figura el proceso de adquisición de fotos. El satélite entra desde la derecha de la figura en el modo de ahorro de energía. El CDHS ordena a la cámara obtener la foto. Después de esto el CDHS ordena al ADCS cambiar a modo de ahorro de energía. No se necesita ningún control de posición para asegurar la comunicación con la estación de tierra. La determinación de la posición se necesita en en el modo de ahorro de energía y en el modo cámara. La exigencia en la precisión del modo cámera se utilizará también para el modo de ahorro de energía.
No hay comentarios:
Publicar un comentario